0. Tune Up Cruscooter

It's a dirty hot mess. Needs major rewiring. And a working brake.

2. Build a Bi-copter/Tiltrotor. A la V22 Osprey.
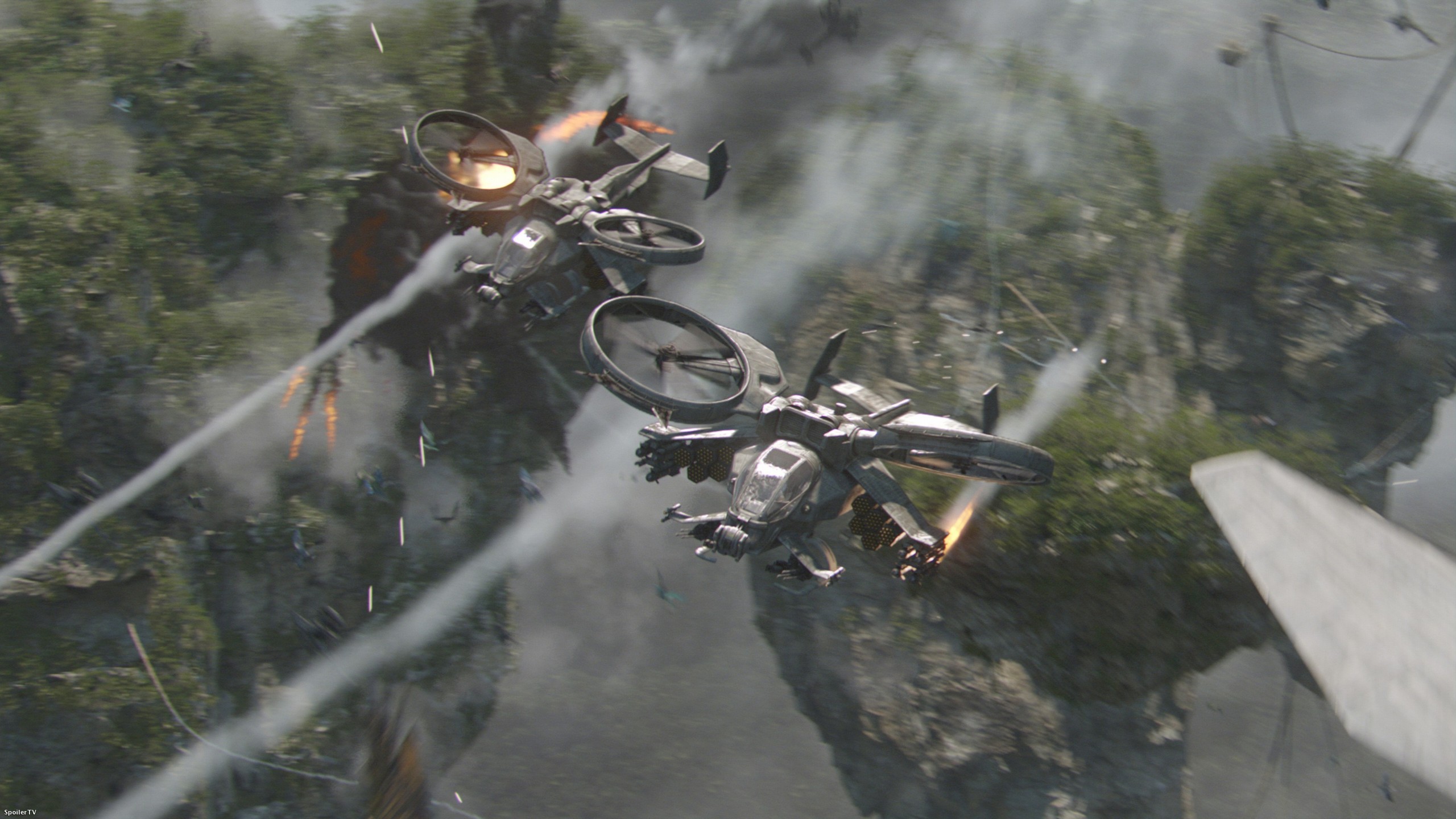
Something I've been wanting to do since I saw the attack choppers in James Cameron's Avatar. And something I tried to do last year when I knew nothing. Now I know a little something, and building a quadrotor will help give me an intuition for flying things.
3. Win MASLAB.
4. Finish MelonChopper

Cannot wait til I can drift this thing in the snow :p
5. Learn to weld steel.
So I can build Certified Legit vehicles. For cheap.
6. DeltaBot.

7. Write an Instructable on manipulator robotics.
I've learned a lot in the past few years, time to spread the love. But first...

9. Pay attention to TurtleBot.

10. Get TurtleBot+TinyArm playing together.

11. Learn ROS. Like really learn ROS.
Willow Garage released its sixth distribution of ROS today, Groovy Galapagos. It's cleaned up a lot, and is apparently easier than ever to use. It'll happen when I try and get TurtleBot+TinyArm to get me soda.
12. Learn C++. Like really learn C++.
See above.
13. Get a summer internship.
I cannot spend another summer at MIT UROPing. I need to see the world. See what industry is like. I need experience. I need to make a difference. I'll probably apply in the next few days...
Ha ha, the stuff you get up to is amazing. Cool prototypes and designs man!
ReplyDeleteVery ambitious plans you have made here, but it is always better to reach for the sky (literally) and achieve the clouds than to aim low and not achieve something.
ReplyDeleteFreelance Graduates
Celebrity net worth and profiles