MELONCHOPPER!

Ever since the end of 2.007 (2.00Scooter) and the Cruscooter build, I've been looking for an excuse to put the experience I gained in designing an electric vehicle to good use. In 2.007EV, I had the opportunity to test out the motley array of vehicles my peers came up with.
.JPG) |
| "Splinter Cell", Credit to Tyler Hamer (tyhammer@mit.edu) |
*Melon: a Turnigy brand 80mm diameter class brushless outrunner motor from hobbyking.com, capable of outputting about 7kW of power.
I wanted to combine the designs: make a gokart-style vehicle powered by a melon, with a custom controller, that happened to be a three-wheeler.
 |
| Because reverse tricycles are freaking badass! |
The Reverse Trike (Probably the incorrect name, usually actually called "Tadpole" configuration) gokart geometry is pretty much just like that of a regular 4-wheeled gokart. The front two wheels steer just like a normal 4-wheeled vehicle, and instead of powering two rear wheels through a differential (Which is a complicated device to make or find), there is a single powered wheel in the center. This offers both simplicity and stability, though you still need to deal with two-wheel steering, which is never trivial.
This is WAY more stable compared to a regular tricycle geometry (Also referred to as Delta geometry), where the rear two wheels are kept facing the same direction (and can be driven through a differential if you'd like) and the front wheel steers. Assuming your configuration contains no leaning (which would mitigate these issues somewhat), if you build up enough forward momentum and want to make a turn, there is the possibility of tipping over the vehicle the opposite direction of the turn.
An excellent analysis of Delta vs. Tadpole trike configurations can be found here: http://www.jetrike.com/tadpole-or-delta.html

Here's what I came up with. The six A123 ALMs are there for no reason other than to get an estimate for the storage capabilities. I first put together the basic structure, defining parts to pretty imperial lengths with little though, making this preliminary splatter of ideasauce more art than engineering. The wheelbase is reasonably wide for stability while keeping the 8020 happy.
I used 10" pneumatic tires instead of the trusty 8" ones on my scooter to give me a bit more added traction when maneuvering at high speeds. The tractor seat is one I found randomly on MIT campus for free. The 8020 framing is all held together by waterjet aluminum plates a la Chibikart and Tinykart.

Here you can see the basic steering mechanism and uprights close up. The uprights are pretty much copied from Chibikart's: stacked plates enclosing a steel hex cap bolt (which is the axle). It's a solid design, so I just scaled it up to work with the larger 5/8" shafts required for my 10" wheels.
Now I needed to work on the steering geometry. For most cars/gokarts, Ackerman Steering is used to make sure both wheels experience minimal slippage (translating to damping losses and wear on the tires) when turning. To get the whole Ackerman Steering geometry going, I used the following simple diagrams off the Wikipedia page:
 |
| See how the front wheels are angled slightly differently? |
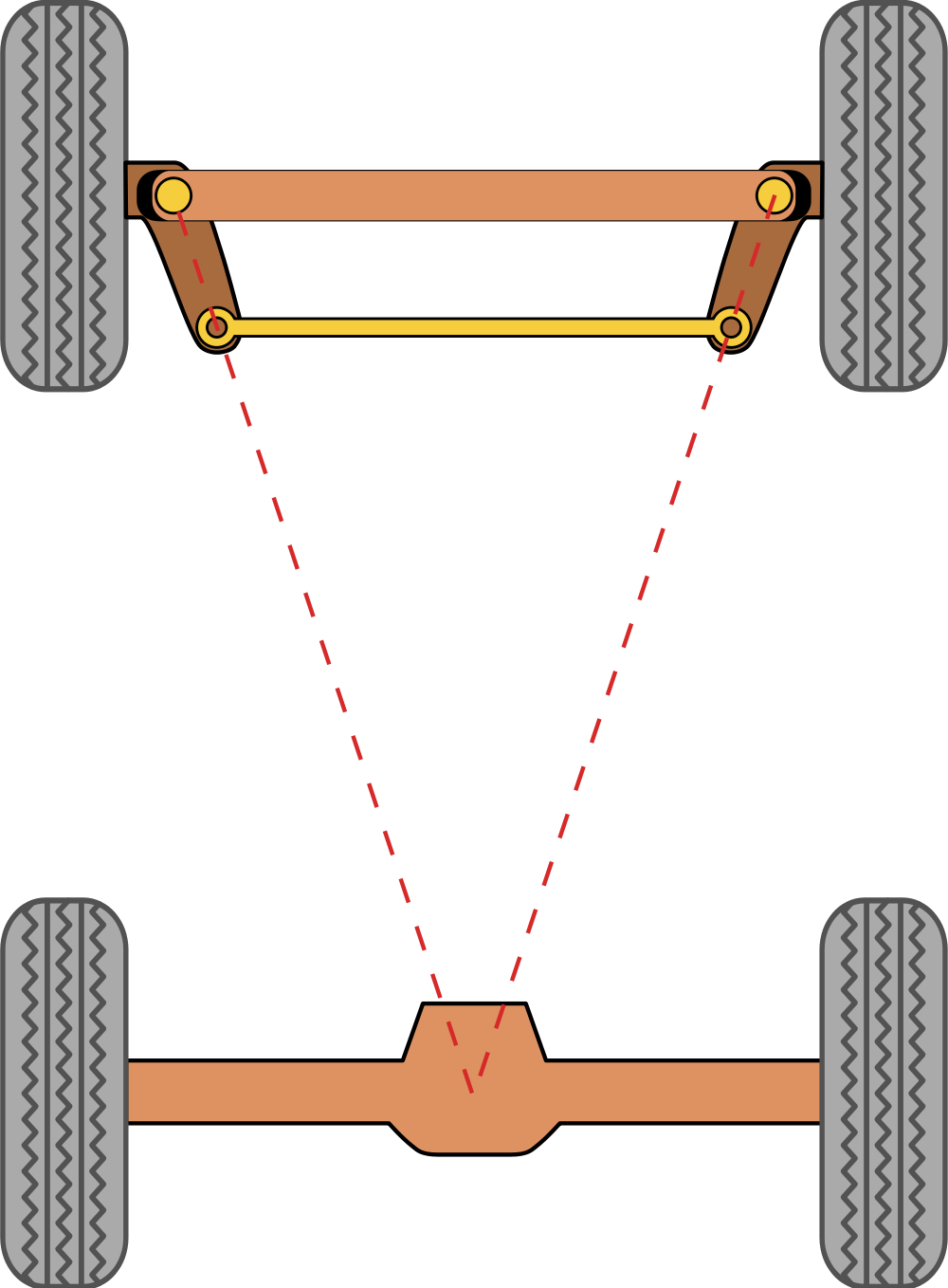 |
| Thank you Wikipedia for pretty and useful diagrams! |
This tells me that when the kart is steering straight forward, the line created by the steering pivot point and the tire rod pivot point should pass through the center point of the rear axle. To get this working with Melonchopper, I temporarilyforced the front wheels to be parallel and face straight. I then computed the required angle needed for the above-described line to work.
 Now it was time to really flesh out the steering. Here you can see my initial Designarrhea, before my hours of tuning which actually took into account the fact the the vehicle's operator has legs. I took my "no need to reinvent a perfectly good wheel" approach even further, basing the steering column/tirerod assembly almost directly off of Shane Colton's TinyKart.
Now it was time to really flesh out the steering. Here you can see my initial Designarrhea, before my hours of tuning which actually took into account the fact the the vehicle's operator has legs. I took my "no need to reinvent a perfectly good wheel" approach even further, basing the steering column/tirerod assembly almost directly off of Shane Colton's TinyKart. 
However, rather than decouple part of the tire rods to certain axes, which Shane did to allow part of the tire rod to remain completely planar and pass beneath Tinykart's frame, I opted for a single set of tire rods which passed under the driver's legs. The lower and more planar I could place the tire rods, the better, because less nonlinearities show up in the steering configurations. Remember, small angle approximation! (See the link to Chibikart above, where the steering linkages are almost exactly planar.)
 |
| Melonchopper, now with More Legit Steering. |
With some tuning, I was able to get the steering wheel in a comfortable position while removing much of the nonlinear behavior usually seen in this not-planar nonideal steering configuration.
 |
| Driver's view. Pretty sweet looking for my derpy design process, right?! |


The above picture also accurately demonstrates the usefulness of the Ackerman steering geometry: note the left(starboard) wheel is angled a little more than the right wheel.
 |
| More POV steering action! |
 |
| He's going to KILL me for posting this pic :p |
Bayley is designing the motor driver with one thing in mind: 7 KiloWatts, which is the full rated power of the Melon motor. Why is this a YAMEB-Certified Big Deal? MITERS has never ever seen the full power of a Melon motor, and this is the perfect excuse to make the 70-volt 100-Amp motor controller we have all been dreaming of. With my mechanical design and his electronic magicking, Bayley and I make an excellent team.
Just to demonstrate how much of a Big Deal this controller is, let's plug it into WolframAlpha with a 15-tooth sprocket on the Melon and the stock 55-tooth sprocket available on the Razor E300 10-inch wheel we're planning on using.
 |
| Mother of God... |

Oh and we got full ($500.00) Techfair funding for this project. Which is totally enough to get all the parts and stuff. Booyah I can't wait to do some snow drifting this January!
The logistics performance index of Panama is 3.19. It indicates a satisfactory performance - in general, traffic is handeled well, some flaws in certain areas are possible, but overall the logistics system performs reliably and is ready to handle predictable amounts of traffic. http://www.confiduss.com/en/jurisdictions/panama/infrastructure/
ReplyDeleteHow to Connect Brother Printer to WiFi-Don't you simply disdain those occasions at whatever point something should be printed rapidly? In any case, your brother printer is put away a long way from you, or you need to continue to connect a bulky USB link? A wireless association with a wireless Brother printer will permit you to print, fax, and sweep without being actually Connect brother wireless printer to wifi router appended to the unit. We should investigate associate the Brother printer to WiFi. Wireless printing is currently incredibly helpful at home and the wor environment. Most up-to-date Brother printers can interface straightforwardly to your WiFi or I can say wireless network. This will permit you to take a print with the assistance of your wireless Brother printer from any PC on your wireless loyalty network.
ReplyDeleteDownload PC Drivers - Windows 10, Windows 8, Windows 7, XP and Vista Drivers - Help and Fixes for Driver Updates and Windows and Mac Errors and Support.
ReplyDeleteFirst of all, your blog is fun. I would love to see more articles like this. I will always check your blog next time, as you have great articles. If you would like to learn more about You can perform better if you have more mouse clicks, you can also visit the article I wrote about the topic. This post requires a lot of research and time for me. Please visit butterfly clicking and let us know what you think.
ReplyDeleteThanks for sharing this best stuff with us! Keep sharing! I am new in the blog writing. All types blogs and posts are not helpful for the readers. Here the author is giving good thoughts and suggestions to each and every reader through this article. Quality of the content is the main element of the blog and this write my college paper is the way of writing and presenting.
ReplyDeleteThis article inspired me, this writer is a great blogger and he has a fantastic blog. It is recommended to use the CPS tester profile because it is a free online game that measures clicks per second. Based on the number of clicks you make on your site each second, the click speed test measures your site's click speed.
ReplyDeleteVery efficiently written information. It will be valuable to everyone who utilizes it, please Keep doing what you are doing and keep sharing amazing information like this, it means so much if you can checkout some of mine, I have also written a article would like to share this article with you related to how fast can we increase CPS count with CPS counter. I will appreciate your valuable review on my article.
ReplyDeleteThis blog post offers an interesting perspective on the Melonchopper and its performance capabilities. It is exciting to see such innovative engineering in action, especially for those who appreciate high-performance vehicles. For readers considering upgrades or looking to part with older cars, exploring services like Cash for Scrap Cars Parramatta can provide a convenient solution while making room for new projects.
ReplyDeleteWhat an excellent resource. Your explanation is so thorough. Be sure to read this other article too What Is The IQ Formula. IQ tests include various challenges that examine multiple cognitive functions.
ReplyDeleteI like how this project combines different vehicle designs.
ReplyDeleteReally enjoyed reading about the Melonchopper—such a fun and unique take on high-performance biking! It’s always cool to see how creativity meets function in unexpected ways. Made me think about how people innovate in other industries too, like automotive recycling. If you're ever upgrading your ride and need to get rid of the old one, services like Cash For Unwanted Cars Caboolture offer a convenient way to clear out space while also supporting sustainable practices.
ReplyDeletebusiness law assignment help provides expert academic support for contract law, corporate law, commercial law, and legal case analysis. Qualified law specialists deliver well-researched, plagiarism-free assignments aligned with university guidelines. With timely delivery and clear legal explanations, students can strengthen understanding and achieve higher academic results.
ReplyDelete