0. Tune Up Cruscooter

It's a dirty hot mess. Needs major rewiring. And a working brake.

2. Build a Bi-copter/Tiltrotor. A la V22 Osprey.
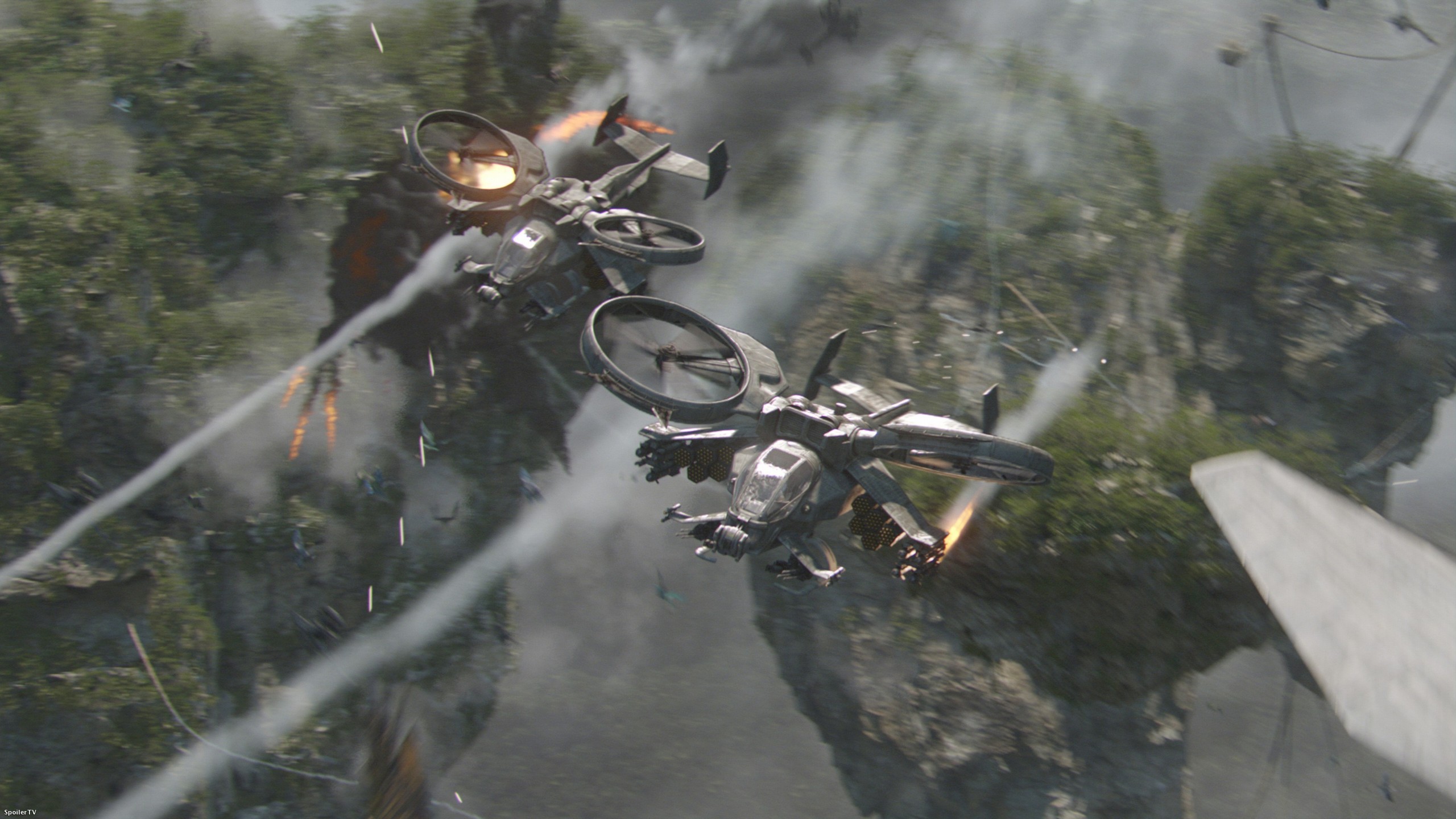
Something I've been wanting to do since I saw the attack choppers in James Cameron's Avatar. And something I tried to do last year when I knew nothing. Now I know a little something, and building a quadrotor will help give me an intuition for flying things.
3. Win MASLAB.
4. Finish MelonChopper

Cannot wait til I can drift this thing in the snow :p
5. Learn to weld steel.
So I can build Certified Legit vehicles. For cheap.
6. DeltaBot.

7. Write an Instructable on manipulator robotics.
I've learned a lot in the past few years, time to spread the love. But first...

9. Pay attention to TurtleBot.

10. Get TurtleBot+TinyArm playing together.

11. Learn ROS. Like really learn ROS.
Willow Garage released its sixth distribution of ROS today, Groovy Galapagos. It's cleaned up a lot, and is apparently easier than ever to use. It'll happen when I try and get TurtleBot+TinyArm to get me soda.
12. Learn C++. Like really learn C++.
See above.
13. Get a summer internship.
I cannot spend another summer at MIT UROPing. I need to see the world. See what industry is like. I need experience. I need to make a difference. I'll probably apply in the next few days...




